SkyDrive (v1.0)
![]()
![]()
![]()
![]()
![]()
![]()
![]()
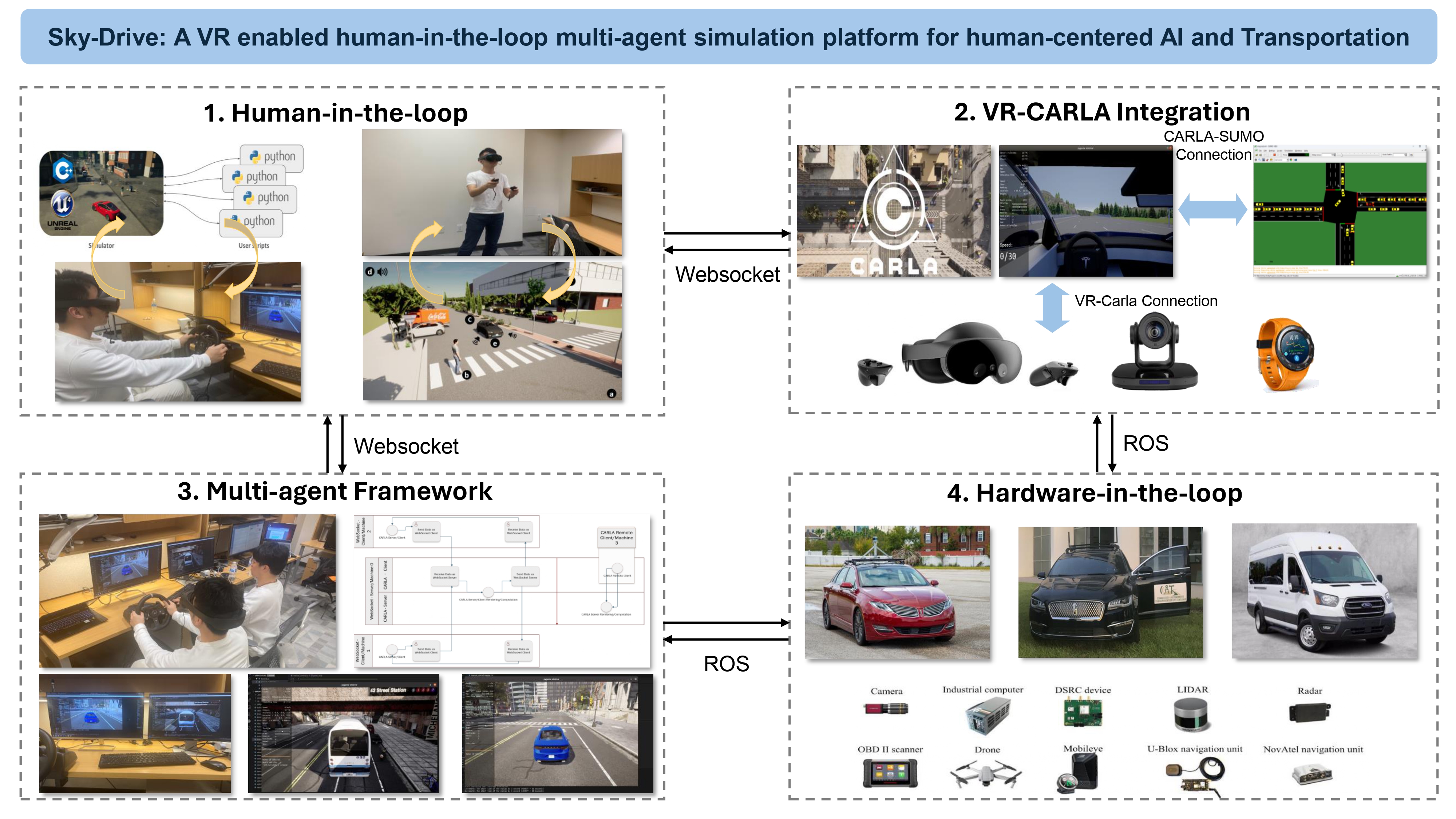
SkyDrive is a multi-agent human-in-the-loop, digital-twin-enabled traffic simulator that integrates CARLA, VR, Websocket, and ROS to create a versatile and formidable research platform. This synergistic integration crafts highly realistic and dynamic settings, enabling comprehensive studies of human behavior, vehicle dynamics, and the intricacies of connected transportation systems.
A particularly notable aspect of SkyDrive is its innovative multi-agent and human-in-the-loop capabilities, which allows the incorporation of numerous human participants as interactive agents within the simulation environment. This allows for the simulation of complex interactions among a variety of intelligent agents, such as autonomous vehicles (AVs), human-driven vehicles (HVs), and pedestrians. Such functionality offers deep insights into the nuanced interplay of human actions within traffic ecosystems.
Current version: SkyDrive (v1.0). Some modules listed below are still under development/improvement.
The main functions of SkyDrive are as follows:
CARLA Integration
- Utilizes CARLA, an open-source simulator for autonomous driving research, to create accurate and realistic urban environments.
- Provides richly detailed environments including dynamic weather, a variety of lighting conditions, and a wide range of road types and configurations, serving as an effective testbed for research and development.
SUMO Integration
- Integrates the Simulation of Urban MObility (SUMO) software for accurate traffic simulation and modeling.
- Simulates realistic vehicle behaviors, traffic flows, and road networks, contributing to a lifelike environment.
- Enables the customization of traffic scenarios, road layouts, and traffic signal configurations.
Logitech Racing Wheel Integration
- Integrates Logitech racing wheel hardware for realistic vehicle control and interaction.
- Enables users to simulate vehicle maneuvers, including acceleration, braking, steering, and other driving actions.
- Provides a tangible and immersive experience for testing and evaluating control algorithms.
VR/AR Integration
- Integrates Virtual Reality (VR) and Augmented Reality (AR) technologies for an immersive and interactive experience.
- Allows researchers and developers to experience the simulated environment firsthand, enhancing situational awareness.
- Supports the development of VR/AR-based human-machine interfaces and user interaction experiments.


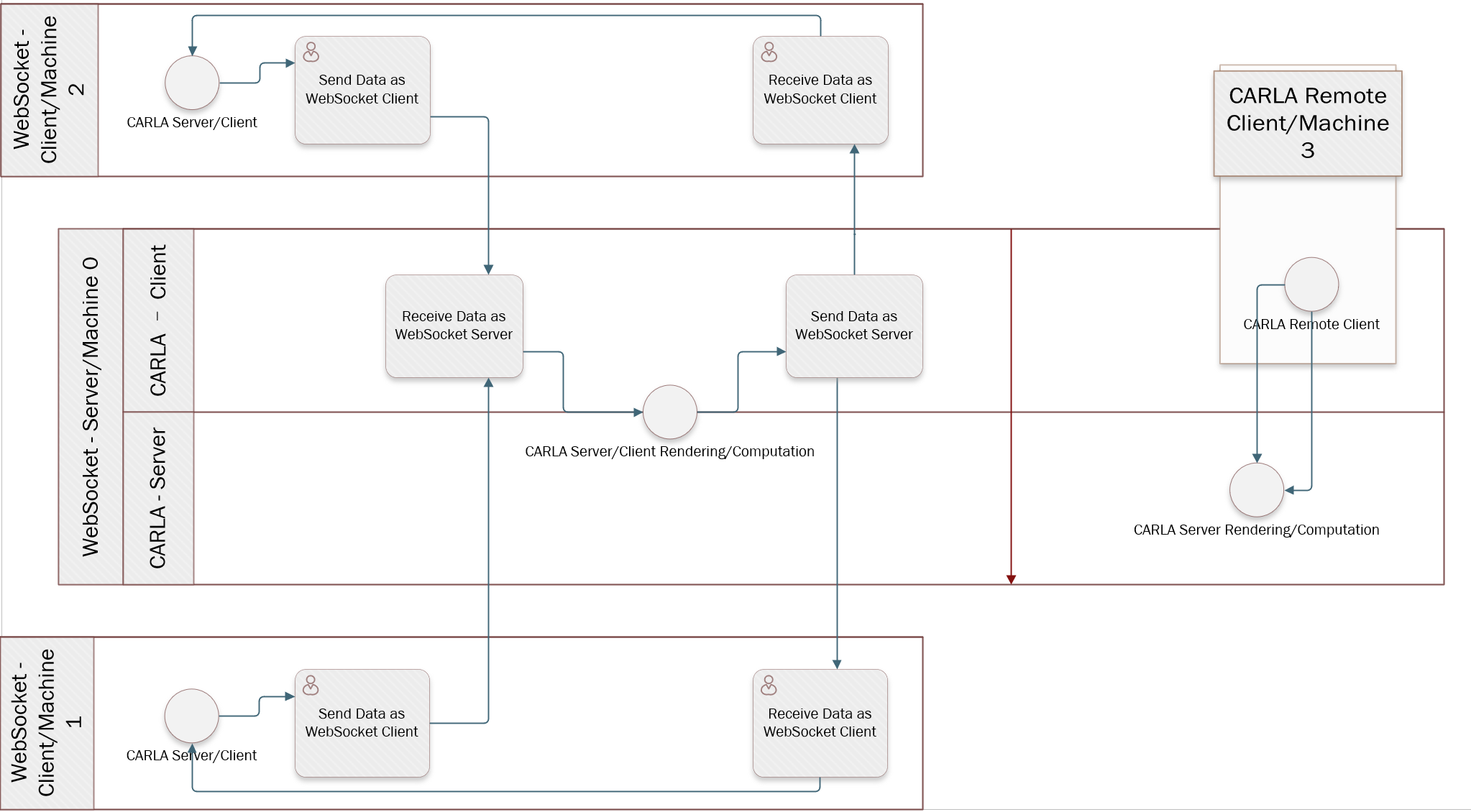
ROS Integration
- Incorporates the Robot Operating System (ROS) into SkyDrive, bolstering the development and evaluation of autonomous vehicle algorithms.
- Leverages ROS’s extensive libraries for robotics and automation, enabling the creation of advanced control strategies and the simulation of complex vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communications.
Multi-Agent System Integration
- Incorporates a sophisticated multi-agent system framework into SkyDrive, allowing for the simulation of complex, interactive scenarios with multiple autonomous and human-controlled agents.
- Each agent operates within the simulation as a discrete entity with its ability to perceive the environment, make decisions, and execute actions, mimicking real-world interactions.
- Supports the development of advanced multi-agent coordination algorithms and enables the study of emergent behaviors in large-scale, dynamic systems.
CAV Planning and Control
- Enables the testing and validation of CAV algorithms for path planning, trajectory optimization, and collision avoidance.
- Facilitates the evaluation of CAV control strategies in complex traffic scenarios.
Human-Machine Interface (HMI) Experiments
- Supports the development and testing of intuitive and effective HMIs for both human drivers and autonomous systems.
- Allows for the assessment of user interactions, feedback mechanisms, and user experience in various driving scenarios.
Reinforcement Learning and Deep Learning Experiments
- Provides a platform for training and evaluating RL and deep learning models for traffic control, decision-making, and optimization.
- Enables researchers to experiment with advanced AI techniques to improve traffic flow and efficiency.